超声波传感器是机器人等级考试三级中常用的传感器,主要用于距离测量,可实现避障等功能。
以下是相关入门教程:
工作原理
超声波传感器通过发射超声波信号,并接收其反射回来的信号,根据时间差计算出距离。
其核心公式为:距离 = 时间差 × 声速 ÷2。超声波在空气中的传播速度大概是 343m/s,传感器上有发射器和接收器,发射器发射超声波信号,碰到障碍物后反射回来,由接收器接收,控制电路则负责处理信号并输出距离数据。
硬件连接
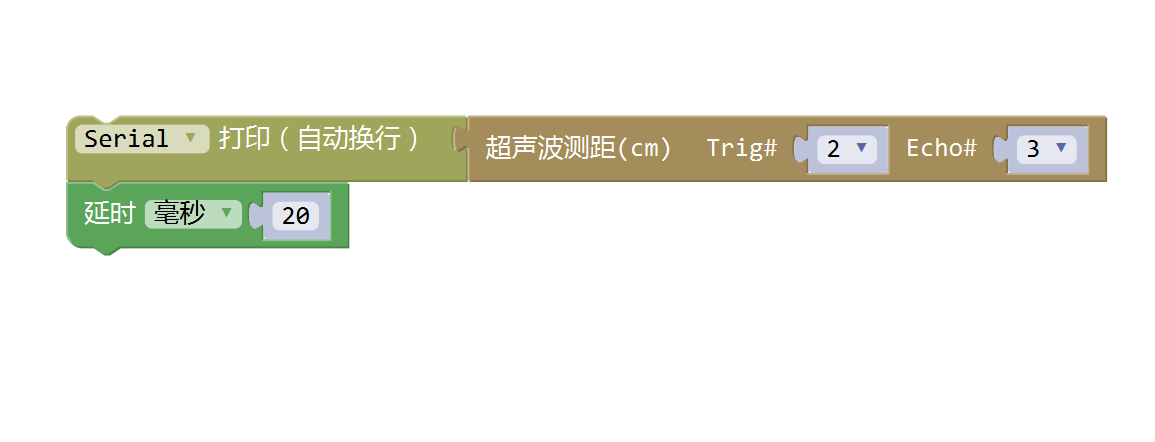
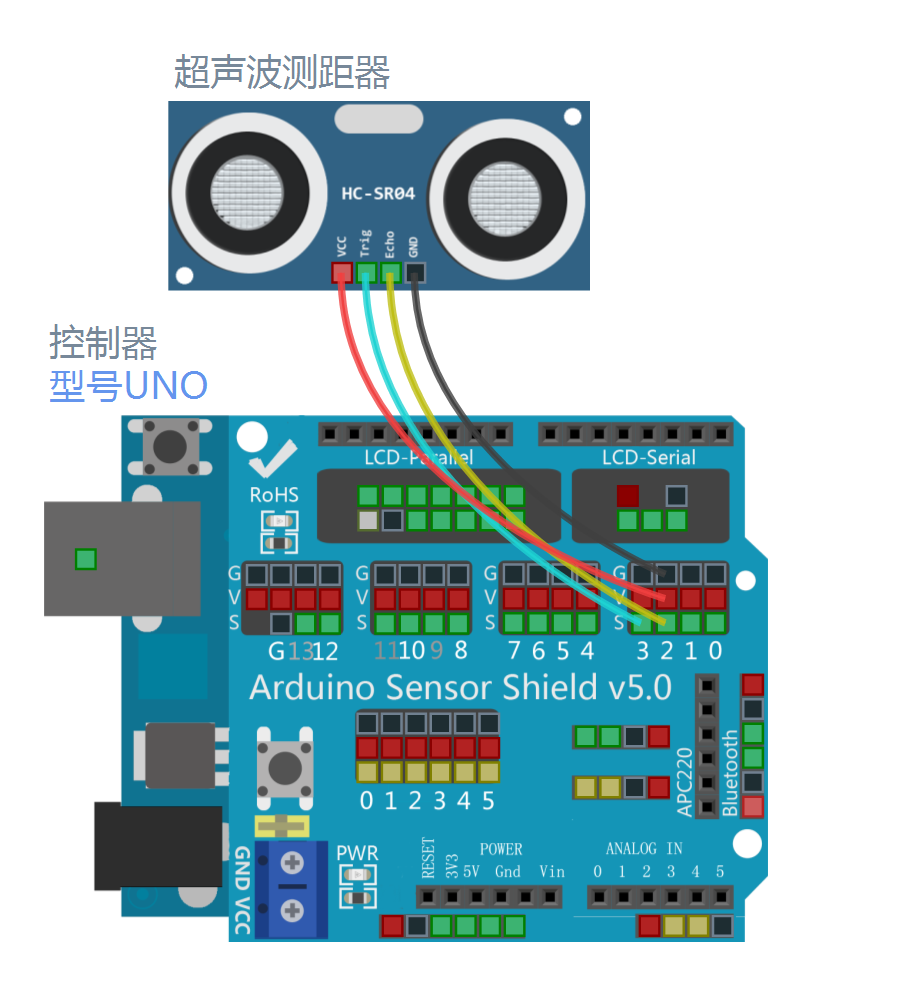
以常见的 HC - SR04 超声波传感器为例,其有 4 个引脚,分别是电源(VCC 和 GND)、发射端(Trig)、接收端(Echo)。通常将 VCC 连接到主控板的 5V 引脚,GND 连接到主控板的 GND 引脚,Echo 连接到主控板的一个数字引脚(如引脚 2),Trig 连接到主控板的另一个数字引脚(如引脚 3)。
若使用 Arduino Uno 主控板,可按上述引脚连接方式进行连接。
常见应用场景
在机器人等级考试三级中,超声波传感器常用于实现预警雷达、自动避障等功能。
如预警雷达任务中,可将超声波传感器与舵机结合,舵机转动时带动超声波传感器检测不同角度的障碍物距离,当检测到障碍物距离小于设定值时,可通过控制舵机停止转动并点亮 LED 灯等方式进行预警。
3 条评论
-
admin SU @ 2025-6-7 10:18:37
-
@ 2025-6-7 10:16:32


-
@ 2025-6-7 10:15:38
- 1